
������(d��ng)��(d��ng)����(du��)��λ���Ȝyԇ�����о���ͨӍ ��
���P(gu��n)朽ӣ� �Ї���ȫ�W(w��ng) �Ї��|(zh��)���W(w��ng) �Ї�Փ�ľW(w��ng) �Ї��YӍ�W(w��ng)
������(d��ng)��(d��ng)����(du��)��λ���Ȝyԇ�����о���ͨӍ ��
���ݣ� ����
����܊���̴�W(xu��)��(d��o)������ϵ����h430033��
ժҪ�������о����m���ڱ�����(d��ng)�B(t��i)��(du��)��(d��ng)�B(t��i)��λ�ľ��Ȝyԇ���������������L�ȼs���z�y������(d��ng)�B(t��i)˲�r(sh��)���șz�y��������GrafNavܛ�����^�����Լ���(sh��)�r(sh��)�c�º���^���ȣ���ͨ�^��(sh��)����(sh��)��(j��)�M(j��n)���˷������(y��n)�C�����Y(ji��)�����������șz�y�����ɿ���Ч���܉�M���(d��ng)��(d��ng)��λ�ľ��șz�y����
�P(gu��n)�I�~������ϵ�y(t��ng)�����Ȝyԇ����(d��ng)�B(t��i)˲�r(sh��)��GrafNav
�ЈD���̖(h��o)��P228.4 ���¾�̖(h��o)��1671 - 637X( 2016) 04 - 0066 - 04
0 ����
���y(t��ng)GNSS��ֶ�λ��ǰ���ǻ���(zh��n)վ����(du��)����̎���oֹ?f��n)�B(t��i)����˿������û���(zh��n)վ�ľ��_λ�������������(du��)λ�õļs������(sh��)�����ں�������(du��)�Ӻ��w�C(j��)��Ş��һЩ��(y��ng)���У���Ҫ�����ǃɂ�(g��)�\(y��n)��(d��ng)�d�w֮�g������(du��)λ��ʸ�����@��g(sh��)���Խy(t��ng)�Q���(d��ng)��(d��ng)����(du��)��λ¨��
�ڄ�(d��ng)��(d��ng)����(du��)��λ�о��У���Μyԇ�u(p��ng)��ij��λϵ�y(t��ng)���㷨�Ķ�λЧ���������ľ��ȡ������ԡ��B�m(x��)�Ժ�����Եȷ������֣������Ȅt������ֱ���f��ϵ�y(t��ng)���㷨��λЧ�������ӣ����Ȝyԇ���Д�͜yԇģ�ͷ��������Լ����ܵ��P(gu��n)�I�h(hu��n)��(ji��)����(d��ng)��(d��ng)��λ�����ڻ���λ�õIJ���׃����һ����y�ҵ����ھ��șz�y�Ļ���(zh��n)���Ҍ�(sh��)�r(sh��)Ұ��yԇ���y��(f��)�F(xi��n)�����Ԍ�(du��)��(d��ng)��(d��ng)��λ�M(j��n)�о��șz�y�����^���y�ȣ����y(t��ng)���o�B(t��i)��(du��)�o�B(t��i)��λ���߄�(d��ng)�B(t��i)��(du��)�o�B(t��i)��λ�ľ��Ȝyԇ�����У����o�B(t��i)�����L����֪�l���µęz�y������(sh��)�r(sh��)��λ�Y(ji��)���c�º�Y(ji��)�����^���ȣ�����(du��)��(d��ng)��(d��ng)��λ��(y��ng)�ö��ԣ��@Щ������������ȫ�淴ӳ�����㷨ģ�͵�Ч����
�ć�(y��n)�����x���v��λ����( Position Accuracy)������(zh��n)�_��( Accuracy)�;��_��(Precision)�ɷ���ָ��(bi��o)�����У���(zh��n)�_����ָ�y��ֵ�c�挍(sh��)ֵ�ķ��ϳ̶ȣ����ڌ�(du��)������ߜy��ֵ�(y��n)�C�Ƿ����_�����ӣ����_����ָ��Μy���Ĝy���Y(ji��)���˴�֮�g�ķ��ϳ̶ȣ����ڱ����y��ֵ�Ŀ��؏�(f��)�ԡ��Č�(d��o)����λ�����о����ԣ���λ���ȸ������ָ��(d��o)���O(sh��)��y��λ���c���y�c(di��n)�挍(sh��)λ�õ�һ�³̶ȣ�Ҳ���Ƕ�λ��(zh��n)�_�ȡ����õľ��Ƚy(t��ng)Ӌ(j��)������RMS�����������A�����`�(CEP)��������`�( SEP)�ȣ����У�RMS�������^�鳣�ã���ָ65 010���Ÿ��ʽy(t��ng)Ӌ(j��)���`��Y(ji��)������Ҫ�f�����ǣ����ȫ���(zh��n)�_�،�(du��)��λ�����M(j��n)�Мy�����ڱ����У���λ���ȵ�Ӌ(j��)���������нY(ji��)����95%���Ÿ��ʽy(t��ng)Ӌ(j��)����Ҫ����ָ��(bi��o)��
1�o�B(t��i)�z�y��
�o�B(t��i)�z�y���Ƕ�λ���șz�y������(sh��)�F(xi��n)��Ҳ���Ҋ�ķ�����һֱ�V����(y��ng)���چ��c(di��n)��λ����Ҏ(gu��)RTK���W(w��ng)�j(lu��)RTK�ȶ�λ���g(sh��)�ľ��șz�y����Ҫ�����ǣ�����֪�ą^(q��)���(n��i)�xȡ�ɂ�(g��)�z�y�c(di��n)���M(j��n)���L�r(sh��)�g��ͬ���o�B(t��i)�^�y����(du��)�L�r(sh��)�g�ɼ��Ĕ�(sh��)��(j��)�M(j��n)��̎�����õ��ă��c(di��n)֮�g������(du��)����������������z�(y��n)��(bi��o)��(zh��n)���yԇ�^���У�������(zh��n)վ������(d��ng)վ���ՙC(j��)�քe���ڃɂ�(g��)��ͬ�ęz�y�c(di��n)���M(j��n)���o�B(t��i)���c(di��n)��λ���ɼ������攵(sh��)��(j��)�����º�(sh��)��(j��)̎���^���У��Y(ji��)�����еĻ�����������(zh��n)����(du��)��(sh��)�r(sh��)��λ�Y(ji��)���M(j��n)�з����y(t��ng)Ӌ(j��)�����Ԝy���o�B(t��i)�l���µĶ�λ���ȡ�
���o�B(t��i)���șz�y�����У����@����(y��u)�c(di��n)���ڙz�y�ĽY(ji��)�������^���(zh��n)�_�ط�ӳ��λ�ľ��ȣ�������֮̎���ڙz�y��(d��ng)��(d��ng)��λϵ�y(t��ng)�r(sh��)��������ȫ��ӳ��λ���Ⱥ͜yԇģ���㷨����ԭ���������c(di��n)�����ȣ��o�B(t��i)�z�y����ͨ���Dz����o�B(t��i)�y����ʽ�����@�N�l���yԇ�ĽY(ji��)�����^���룬�y���挍(sh��)��ӳ��(sh��)�H��(d��ng)��(d��ng)����(du��)��λ��(y��ng)���еľ��Ȝyԇ����Σ��o�B(t��i)�z�y��Ҫ��׃����֪��(zh��n)�_����(bi��o)���c(di��n)��������(du��)������(bi��o)��(zh��n)������ijЩ�y����(f��)�s�^(q��)���^�y��(sh��)�F(xi��n)��
2��(d��ng)�B(t��i)�z�y����
�ڌ�(du��)���y(t��ng)���șz�y�������Ļ��A(ch��)�ϣ����ؿ��]��(sh��)�H��(d��ng)��(d��ng)����(du��)��λ�����c(di��n)����(y��ng)�×l�������أ�������N��ͬ��͵Ą�(d��ng)��(d��ng)���Ȝyԇ������
1)�����L�ȼs���z�y����
����������֪���c(di��n)֮�g�����Ą�(d��ng)��(d��ng)����(du��)��λ��r�£��T��̶�����܇���d�w֮�g�Ľ��ՙC(j��)���@�N����һ���������о��d�w�����S�ˑB(t��i)׃���Լ�����ʸ����׃������һ���摪(y��ng)���ڌ�(du��)����(du��)�������㷽���ɿ��ԺͿ����Ե��(y��n)�C������������ǣ�����վ������(d��ng)վ�Ľ��ՙC(j��)�쾀�̶���ijһ��(g��)�\(y��n)��(d��ng)�d�w�ϣ��M(j��n)���L�r(sh��)�g�Č�(sh��)�r(sh��)��(d��ng)�B(t��i)��λ�����ɼ���(sh��)��(j��)�����º�̎���^���У���������֪�����L�ȵ���Ϣ����������ijЩ�㷨��(du��)�ɼ���(sh��)��(j��)�M(j��n)�н���ó�������L�ȽY(ji��)�������˽Y(ji��)������֪�Ļ����L�������^�����ߵIJ�ֵ��ӳ��ijЩ�㷨�ľ��ȺͿɿ��ԡ�
2)��(sh��)�r(sh��)�c�º�̎���Y(ji��)�����^��
һ����ԣ�GNSS��(sh��)��(j��)���º�̎��Ч��Ҫ���@��(y��u)�ڌ�(sh��)�r(sh��)̎������ˣ���������о���(sh��)�r(sh��)�Զ�λ����Ч�����ڲɼ��Ĕ�(sh��)��(j��)�������r�£�һ�㌢�º�(sh��)��(j��)̎���Ķ�λ�Y(ji��)�������(bi��o)��(zh��n)ֵ���ь�(sh��)�r(sh��)����ĽY(ji��)���c�º�(sh��)��(j��)̎���ĽY(ji��)���M(j��n)�б��^������(j��)��ֵ�Y(ji��)�������Ŷȵȷ�ӳϵ�y(t��ng)��(sh��)�r(sh��)��λ���ȡ�
3)��(d��ng)�B(t��i)˲�r(sh��)�z�y��
�鿼���ڄ�(d��ng)��(d��ng)��λ��ijЩ˲�r(sh��)�vԪ��λ�Y(ji��)���Č�(sh��)�r(sh��)���Լ����º����Y(ji��)���ķ��ϳ̶ȣ��ͱ�회�(du��)ijЩ�vԪ��λ�����M(j��n)��˲�r(sh��)�z�y���@Ҫ�����O(sh��)��ijЩ�̶��c(di��n)�����䌦(du��)��(y��ng)�ĚvԪ��(sh��)�r(sh��)����Y(ji��)���c�º�(du��)��(y��ng)�vԪ�Y(ji��)�������^�����w�����ǣ��M(j��n)�о��șz�y�r(sh��)�����O(sh��)���õ��\(y��n)��(d��ng)·���������c(di��n)�����D(zhu��n)���c(di��n)�����c(di��n)�ȣ����O(sh��)�ö���(du��)����(du��)λ�þ��_��֪�ęz�y�c(di��n)��������(zh��n)վ������(d��ng)վ���ՙC(j��)����ͬ�r(sh��)�\(y��n)��(d��ng)��������ij��(du��)�z�y�c(di��n)�ϣ�ӛ��´˕r(sh��)����ı����r(sh��)�̔�(sh��)���º�(du��)ԓ�vԪ�µĽ���Y(ji��)���M(j��n)�б��^���c���o�B(t��i)�͜�(zh��n)��(d��ng)�B(t��i)�yԇ��ȣ�ԓ�����܉�ӳ���ՙC(j��)���\(y��n)��(d��ng)��B(t��i)�������c(di��n)����ֻ�܉�?q��)�ijЩ�r(sh��)�̵��\(y��n)��(d��ng)��B(t��i)�M(j��n)�Йz�y���o���B�m(x��)�ط�ӳϵ�y(t��ng)��λ���ȡ�
4) GPSܛ������Y(ji��)�����^��
GPS��λ���g(sh��)Ŀǰ�ѽ�(j��ng)�dz����죬ϵ�y(t��ng)��λ���ȿ��_(d��)������������(j��)����(du��)�ڶ̻����Ą�(d��ng)��(d��ng)����(du��)��λ���f������ϵ�y(t��ng)�cGPSϵ�y(t��ng)���(d��o)�µĻ�������ƫ����Ǻܴ���GPS����̎���Y(ji��)�������(bi��o)��(zh��n)ֵ�(y��n)�C��������(du��)��λ������һ���ą������á�Ŀǰ���T���m�����o�B(t��i)����(d��ng)�B(t��i)GPS��(sh��)��(j��)���������ܛ������GrafNavܛ���ȡ�GrafNav��Novatel��˾��GNSS�º�̎��ܛ����ԓܛ�����������ƵĞV���㷨������(qi��ng)��(w��n)���������p�lGPS��5 km��(n��i)�Ą�(d��ng)�B(t��i)�y�����ȿ��_(d��)��1cm +1ppm��GrafNav Web���������@Щܛ�������GPS�Y(ji��)����������z�yBDS��λ���ȵ��o��������(bi��o)��(zh��n)��
3��(sh��)������
�ڌ�(du��)���șz�y���������½�B�Y(ji��)�ϲ���ԇ�(y��n)��(sh��)��(j��)�M(j��n)�Ќ�(sh��)���f����
3.1�o�B(t��i)�z�y��
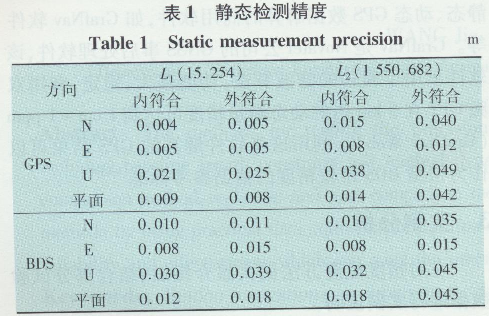
���(y��n)�C�����o�B(t��i)�z�y��Ч�����F(xi��n)�M(j��n)���o�B(t��i)����(du��)��λԇ�(y��n)�(y��n)�C�����ڌ�(sh��)�H��(y��ng)��������(du��)��λ�Ļ�������(hu��)���L���F(xi��n)�x��Ɍ�(du��)����(du��)����(bi��o)���_��֪�ęz�y�c(di��n)������һ�l�鳬�̻���L1����(j��ng)�y���L�Ȟ�15.254 m����һ�l����L2�L�����L����1550. 682 m���z�y�^���У�ÿ�l������ͬ���^�y�r(sh��)�g����1h���ң��ɘӕr(sh��)�g��1 s����(sh��)�r(sh��)����ܛ������(j��)�ɼ��Ĕ�(sh��)��(j��)��(d��)�������ÿ��(g��)�vԪGPS��BDS�Ļ����Y(ji��)�����քe�y(t��ng)Ӌ(j��)����(y��ng)��ă�(n��i)������Ͼ��ȡ�
��1��ɗl�������o�B(t��i)�z�y�Y(ji��)�������ɗl�yԇ�������Ի���(zh��n)վ�����ĵĖ|��������(bi��o)ϵ�µ�N��E��U��ƽ�淽���ϵă�(n��i)����Ͼ��ȡ����У�N��E��U����ƫ����Ի���(zh��n)վ�����Ė|������������(bi��o)ϵ�µ�ֱ������(bi��o)��
�ɱ�1���Կ�����BDS��(sh��)�r(sh��)��������Y(ji��)����N��E��U3�����ƽ�淽�������Ͼ��ȶ���(y��u)��4 cm�����У���һ�l����GPS�Ľ���Y(ji��)���ԃ�(y��u)��BDS���ڶ��l����BDS��GPS�Ľ���Y(ji��)�������ஔ(d��ng)�����ҟoՓ��BDSϵ�y(t��ng)߀��GPSϵ�y(t��ng)������Y(ji��)����ƽ�淽��ľ��ȶ��ȸ̷߳���Ҫ�ߡ�
3.2��(d��ng)�B(t��i)�z�y��
������(d��ng)�B(t��i)�z�y��1����3�������c��(bi��o)��(zh��n)�Y(ji��)����(du��)�ȣ������o�B(t��i)�z�y���������������������Ҫ��(du��)�ɷ���ԇ�(y��n)�yԇ��
1)�����L����֪�l���ľ��șz�y��
ԇ�(y��n)�_ʼǰ��������(zh��n)վ������(d��ng)վ���쾀�քe�̶���һ��䓹܃ɶ��ݼy�ӿ�̎���������ڸ��Ե�ԇ�(y��n)С܇�ϣ��ڜy���^(q��)���Ƅ�(d��ng)С܇�\(y��n)��(d��ng)�s10 min����(sh��)��(j��)�ɘ��ʞ�1s��ͬ���ɼ��������վ��(sh��)��(j��)�����Ì�(sh��)�r(sh��)����ܛ���քe���������(g��)�vԪ�r(sh��)�̵�BDS��GPS�Ļ����Y(ji��)�����º�քe�y(t��ng)Ӌ(j��)BDS��GPS��(sh��)�r(sh��)����ă�(n��i)������Ͼ��ȡ��º�(sh��)��(j��)̎��ǰ�����_�y�ù̶������L��ֵ��0. 910 m�����șz�y�r(sh��)���O(sh��)�������L1m�����ޡ���2�г�BDS��GPS��(sh��)�r(sh��)����Ļ����L�Ⱦ���ָ��(bi��o)���D1��ʾ��BDS��GPSÿ��(g��)�vԪ��������L���c��ֵ��ƫ��ʾ�⡣
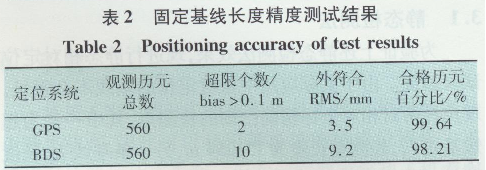
�ɱ�2��֪����ԇ�(y��n)�Y(ji��)���yԇ�У�BDS����õ��Ļ����L������Ͼ��ȶ���1cm�ԃ�(n��i)���cGPS��ȶ��ԣ�BDS��(sh��)��(j��)�����L�Ľ��㾫�Ⱥ͔�(sh��)��(j��)��Ч�ɹ����Ե͡�
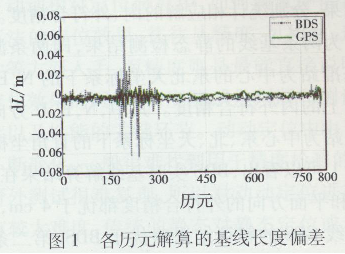
�ɈD1��֪��GPS����ĽY(ji��)��ƫ������ֵ���²���(d��ng)������(d��ng)���ȱ��^С����BDS����(d��ng)�̶ȴ���GPS���ڵ�200��(g��)�vԪ������BDSϵ�y(t��ng)���������(du��)�����`�����0.07 m�����˕r(sh��)GPS��0.01m���²���(d��ng)���S���vԪ��(sh��)���࣬BDS��GPS��K����Ļ���ƫ���Ք���0.01 m��������(j��ng)�������ڵ�200�vԪ����̎�И�ľ�ړ�������BDS��ҕ�l(w��i)�ǔ�(sh��)Ŀ�^�࣬׃���^�죬��(d��o)����ԓ̎BDS��(sh��)��(j��)ƫ���^GPS�����ڈD�б��F(xi��n)���100��200�vԪ֮�g��BDS��GPS����ƫ������������vԪ������BDS׃�����ȸ��鄡�ҡ�
2)��(d��ng)�B(t��i)˲�g�z�y��
�x�������o�B(t��i)�z�y�еij��̻�����z�(y��n)��(bi��o)��(zh��n)����D2��ʾ��BD����z�y������C��������c(di��n)��ԇ�(y��n)�_ʼ��һ���ֳ��b���쾀���b�ð���·��A![]() B
B![]() C�\(y��n)��(d��ng)������һ�˳��쾀�b�ð���·��E
C�\(y��n)��(d��ng)������һ�˳��쾀�b�ð���·��E![]() D
D![]() C�\(y��n)��(d��ng)����(d��ng)?sh��)�һ��ǰ�M(j��n)��B�c(di��n)�r(sh��)�_���ڶ���Ҳ���M(j��n)��D�c(di��n)���ɵ����˸���(j��)����ܛ��ӛ��´˿̌�(du��)��(y��ng)�ı������룬����һ�Ιz�y�������c(di��n)C̎����������������·�����أ�ͬ�Ӄ��˷քe�_(d��)��B�c(di��n)��D�c(di��n)�r(sh��)ӛ��´˿̌�(du��)��(y��ng)�ı��������M(j��n)��һ�Ιz�y���������5��(g��)���أ����z�y10�Ρ�
C�\(y��n)��(d��ng)����(d��ng)?sh��)�һ��ǰ�M(j��n)��B�c(di��n)�r(sh��)�_���ڶ���Ҳ���M(j��n)��D�c(di��n)���ɵ����˸���(j��)����ܛ��ӛ��´˿̌�(du��)��(y��ng)�ı������룬����һ�Ιz�y�������c(di��n)C̎����������������·�����أ�ͬ�Ӄ��˷քe�_(d��)��B�c(di��n)��D�c(di��n)�r(sh��)ӛ��´˿̌�(du��)��(y��ng)�ı��������M(j��n)��һ�Ιz�y���������5��(g��)���أ����z�y10�Ρ�
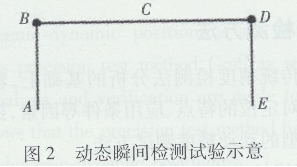
�º�(sh��)��(j��)̎��r(sh��)������(j��)ԇ�(y��n)�^����ӛ䛵ı���������Ҍ�(du��)��(y��ng)�ĚvԪ�������쾀�߳��D(zhu��n)�Q�����yվ�c(di��n)֮�g������(du��)�����Y(ji��)�����cBD������ֵ�����^����3���(d��ng)�B(t��i)˲�g���^�Y(ji��)������vԪ�r(sh��)���Ǐ�195 250�_ʼ����195 500�Y(ji��)����
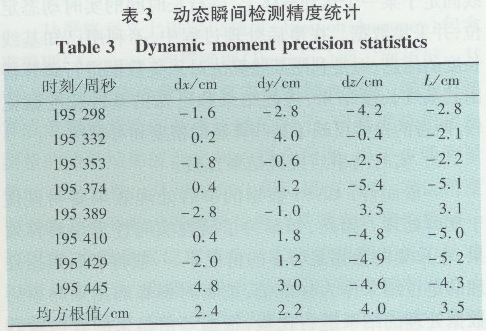
��3��(du��)10��(g��)�vԪ?ji��ng)ӑB(t��i)�l���µĻ�������ƫ���M(j��n)����һ���Ľy(t��ng)һ�����У�d x��d y��d z��ʾ����ܛ����(sh��)�r(sh��)����Ļ��������c����������ֵ��ƫ�L��ʾ�����L��ƫ��ɽy(t��ng)Ӌ(j��)�Y(ji��)�����Կ������ڜyԇ��10��(g��)�vԪ�У�d x��d y��d z��Lƫ������������(j��)ˮƽ�������L�����ƫ������5.4 cm��
4 ���Y(ji��)
��yԇ��(d��ng)��(d��ng)����(du��)��λ�l���µ�ϵ�y(t��ng)�����㷨��λ���ȵĆ��}�������ڂ��y(t��ng)����(du��)��λ���șz�y���������Ļ��A(ch��)�ϣ����؏Ļ����L�ȡ���(sh��)�r(sh��)�Եȗl�����֣��о��˄�(d��ng)��(d��ng)��λ�l���µľ��șz�y���������(y��n)�C���N�����Ŀɿ��Ժ���Ч�ԣ��քe���ԇ�(y��n)�������M(j��n)��ԇ�(y��n)�yԇ���Y(ji��)��ԇ�(y��n)�Y(ji��)�������ɵã�����Ļ����L����֪��r�µ��ºȜyԇ������(d��ng)�B(t��i)˲�g�vԪ�z�y�����܉�ɿ���Ч�ط�ӳϵ�y(t��ng)��λ�ľ����Լ�����ָ��(bi��o)�ȡ���ˣ��ڌ�(sh��)�H��(d��ng)��(d��ng)��λ���Ȝyԇ�^���У�������Ҫ�C�Ͽ��]��(d��ng)�o�B(t��i)��r���Ƿ������֪������ϵ�y(t��ng)�ȶ�N�l�����������x���������Ȝyԇ������
�ИI(y��)�YӍ���c(di��n)������
- 1 ��������������ؙC(j��)��܃�(n��i)��
- 2 ϴ܇�����m���r(ji��)λ
- 3 ���I(y��)�������m���Ƅ�(d��ng)
- 4 �oӡ��Ʒ��δ��֮�ҡ��ذ��ɳ���ľ̩���ṩ
- 5 �P�c(di��n)2018�������ȵذ���¼��\���ИI(y��)�l(f��)չ��څ��(sh��)
- 6 TOKIMEC���b�yTOKIMEC�����_�P(gu��n)
- 7 pcl��ɰ�C(j��)�xُ�`�^(q��)����Щ����ɰ�C(j��)��ɰ�C(j��)�xُע�����(xi��ng)
- 8 �a(ch��n)�I(y��)Ҏ(gu��)ģ���ٔU(ku��)��ͻ�ưك|Ⱥ����¹�������Ј�
չ��(hu��)��Ϣ���c(di��n)������
- 1 2019�Ї����B�T�����H���R�I(y��)չ�[��(hu��)
- 2 2019�Ͼ��V��չ��(hu��)��չ��(hu��)��ԃ������18952050067��
- 3 2019�Ї����B�T�����H���R�I(y��)���[��(hu��)
- 4 2019��ϷʏV��չ����ԃ�Ԓ��18952050067������
- 5 2019�������H�Ƶ���Ʒ���O(sh��)�䲩�[��(hu��)
- 6 2019�Ϻ����H��ů�����{(di��o)��ü��g(sh��)�O(sh��)��չ�[��(hu��)
- 7 2019�꣨��ʮ��ã��Ϻ����Hˮ̎�����W(xu��)Ʒչ�[��(hu��)
- 8 2019��20�����·��Hģ�߹��I(y��)չ�[��(hu��)