
����IRB120�ľퟟ���ܼ��ϼ��㌍��b�õ�����
����܊1��������1�����x1��������2�����1*
1���㽭�П����I����؟�ι�˾������310008����2���Ϻ�������W���Ϻ�200093��
ժҪ��������Ǿퟟ���a����Ҫ�h����ԇ����IRB120������һ��������ܻ���������b�ã����F���z�����ϡ����_������ϡ��ܵ���ϴ�Լ����z�濾�ȭh�����Ԅӻ�����Һ�r�gС��7 min��ʹ�ýM��ʽģ��-PID���Ƽ�Һ�`��С��2%������0.005 g��
�P�I�~ IRB120;���ܻ����������
���a�ퟟǰ���������Ҫ�����υ����M���{������ԇ��о����ԫ@�þퟟ�������ζƷ�|������20��Ҍ���Ҿ������ֹ������{�䣬�䷽���Ͼ������˞�����Ӱ��^��һ�������ļ������ԇҪ�����Ͼ���0.005 g�������ϕr�gС��7 min��Ŀǰ����ᘌ����ϼ����b�����S���о���������ᘌ��ퟟ�S���a�����]�Ќ���ҵ����ܼ��ϼ����b�õ��о���ԇ����ABB��˾��IRB120T�I�C��������һ��������ܻ���������b�ã�������Q�ֹ��{�����ϡ��乤ˇ�������£�

1 ����Ҽ��ϼ���ϵ�y�M��
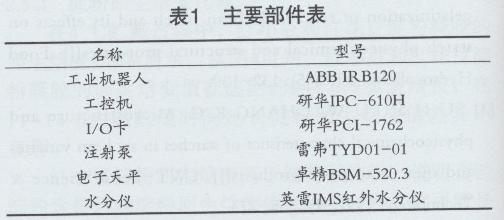
�D1�錍��Ҿퟟ���ܼ��ϼ��㌍��b�ã�ϵ�y����ABB IRB120�����Ԅӻ��ĺ��IJ�������Ҫ�������1��ʾ��

����Ҽ��ϼ���ϵ�y�����ܷ֞�������ģ�K���������ģ�K����ϴģ�K�Լ��濾ģ�K�ȣ���D2��ʾ��
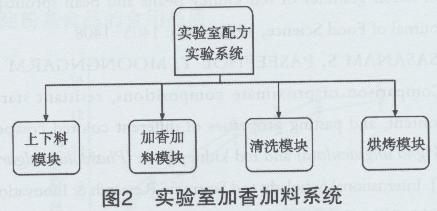
1)������ģ�K�ɻ��ϝLͲ�����M늙C�����Ͽڡ����Ͽڼ����P���Ԫ���M�ɣ����ϝLͲ���ڴ�ş��z�����M늙Cؓ؟���ӝLͲ�D�ӌ��F���z�c���ϳ�ֻ�ϣ�ͨ�^���Ԫ�����ƻ��ϝLͲ��λ�á�
2)���_�������ģ�K��ԓ�b�õĺ��ģ��əCе�֡������_�����ץ�֡�ע��á������ƽ�����ؙC������I/O�忨�Լ�ϡ�ƿ�^���_�ȽM�ɣ����ж��ץ�ְ��b�ڙCе���ϣ��܉�Aȡ��^������ƿ�w��ϡ�ƿ�ȣ�ͨ�^�Cе�ֵ��\������˹��M�����ϼ��ϣ�ͬ�r���Cе����߀����F�����^���܌�ϡጺõ��䷽�F�����뵽���z���У��@Щ���ƵČ��F����ͨ�^���ؙC�͔���I/O�忨��
3)��ϴģ�K���ڱ��⽻����Ⱦ������·����^����̎���Ƀ���ͨ�^ͨ��ˮ��ƾ�����·����^�M�Л_ϴ��ͨ�ˉ��s�՚⣬ͨ�^�՚��Ħ���M�ж��Λ_ϴ��ͬ�r�M�и���̎����
4)�濾ģ�K�ɝLͲ���t��ˮ�փx�͟��L���M�ɣ����L�������Դ���LͲ�M�мӟᣬ�g�ӵ،��LͲ�ȟ��z�濾��ͨ�^�t��ˮ�փx�ıO�y�����F����Һ��ɵğ��z�濾���˜�ˮ�֡�
���ؙC������̫�W�������I�C����ͨ�ţ�ʹ��Socket�f�h�����ƹ��I�C�����\�ӣ�ʹ��RS-232�f�h�c�����ƽ�ͼt���ھ�ˮ�փxͨ�ţ��@ȡ���ϵ��|����Ϣ��ˮ����Ϣ��ʹ��RS-485�f�h�cע���ͨ�ţ����ƾ��_�������ϣ�ʹ��I/O�忨���@ȡ������ݔ����̖�������^�����늴��y��늙C��ָʾ�������
2����Ҽ�����Ͽ����㷨
2.1������Ͽ��Ʋ���
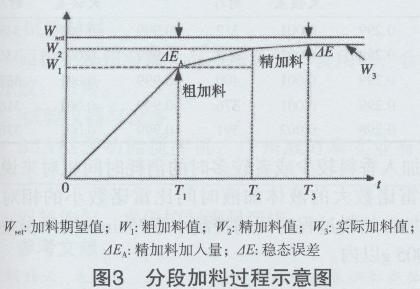
����b�ò��ýM��ʽ������Һ��ʽ����һ�μ�Һ�փɂ��A�Σ����������ܿ����㷨���Ƽ������Һ�w���C�ٶȺ�һ���Ĝʴ_�ԣ���ʹ���c��ʽ��Һ�����a��ʣ��Һ�w���C���ȡ�
��Һ��һ�������ȣ������^�̳��F���������ڴּ����A��Һ�w���{��Ӱ����ϵĜʴ_�ȣ�ԓ������_��������ό���Ч�ʣ��ּ����A��������ٶȼ�����80%��90%���M�뾫�����A�κ�������ٱƽ���Һ�O��ֵ���^����D3��ʾ��
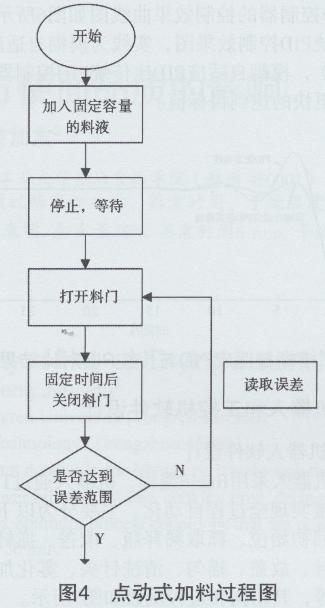
�ڶ��A�Ξ��c��ʽ���ϣ��֞�������E���ȶ��ݣ����ټ��ϣ��������Ⱥ��ܶȣ��ӵ�һ���������P�]�����T���o������Һȫ�����룬Ȼ���x����m�����ٶȣ����Ƽ����T�_�P���c�Ӽ��ϱƽ��A��ֵ�����C���Ϝʴ_�ȡ����w�^����D4��ʾ��
2.2ģ�����m��PID������Ͽ����㷨
����Ʒ�ļ�����Ͽ��Բ����xɢPID�������繫ʽ(1)��ʾ��
�����Ⱥ��ܶ�����Ʒ�N�࣬�μ���PID�������o���M���Һ����Ҫ����ʹ���������и����������ԣ��x��ģ�����m��PID���Ʒ�����
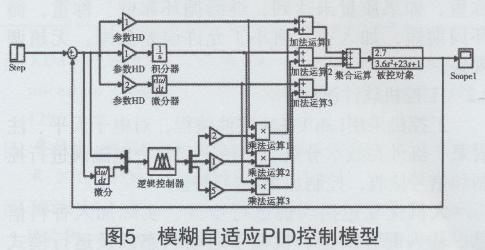
�D5��ᘌ���������ܼ��������Matlab��Simulink�����佨����ģ�����m��PID������ģ�ͣ�
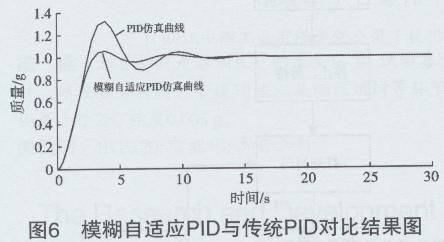
�O�ü�������Ŀ��ֵ��1 g������ģ�����m��PID�c���yPID�������Ŀ���Ч�������D��D6��ʾ������̓������yPID����Ч���D��������ģ�����m��PID����Ч���D����ģ�����m��PID�Ȃ��yPID���������{�����٣��ܸ�����_��Ŀ��ֵ��
3���I�C���˺��ؙCܛ���OӋ
3.1 ���I�C����ܛ���OӋ
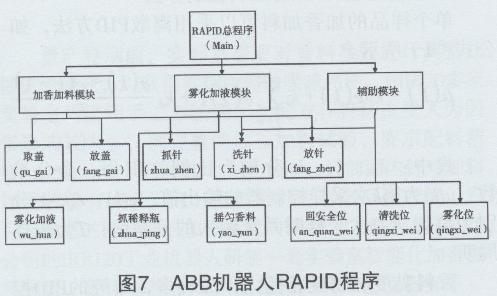
���I�C���˲���Rapid���̣��C����ͨ�^TCP/IP�c���ؙC�B�ӌ��Fȫ�^���Ԅӻ�����Ҫ�֞����ׂ����A���ܣ��س�ʼλ��ץȡϡ�ƿ��ȡ�w��ץᘡ�������ϡ���ᘡ����w���u����ϴ��^���F����Һ����ϴ�F���^�ȣ���Y�����^�̺�����D7��ʾ��
������ϲ��ýM��ʽģ��PID���Ʋ��ԣ���һ�A�β���ģ��PID���ƣ��ڶ��A��ʹ���c��ʽ���ƣ��Cе���M�����ڼ�Һ�������ƙCе���Aȡ����^��ϡ�ƿ�M���c�|������^̎����揈���۷e�����ϼ��r����ƿ�С��C�������ڄ����r���C����ͨ�^Socket�f�h��֪���ؙC��ͣ�Q�أ��C���˷��صȴ������c�ٷQ�أ�����|��δ�_�����^�mѭ�h���ڡ��Q�أ�ѭ�h���ڶ̣���������ֵС�����S�`������o���{�F��
3.2���ؙCܛ���OӋ
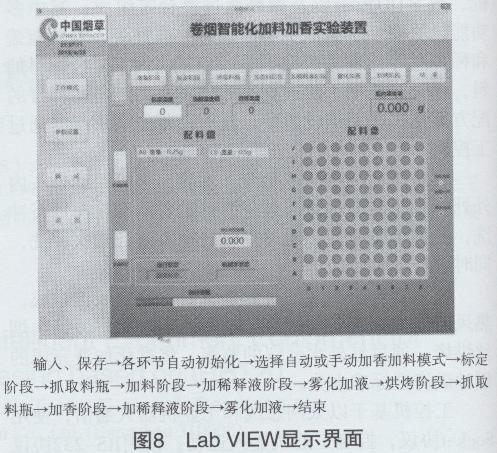
���ؙC����Lab VIEWܛ�����̣��������ƽ��ע��á��t���ھ�ˮ�փx���Cе�ֺ͔���늴��y�M�п��ƺ���̖���գ����Ƽ�������^�̡�
�˙C����������ǰ�M�в��E�����H����������Ϣ��ݔ���䷽��Ϣ���Cе���\�Ӡ�B�Լ��\��ģʽ�ȡ��D8���ʼ�@ʾ���档
4������ό��
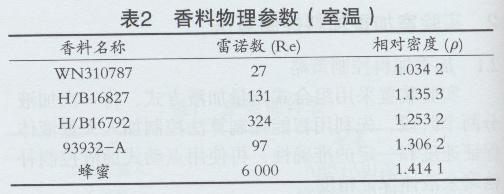
�xȡ5�N��ͬ�Ⱥ��ܶ������M�м������ԇ�����텢��Ҋ��2��
����b��ʹ��Lab VIEW�ȶ��r����y������Һ����Һ�ꮅ�ĕr�g���؏�6��ԇ�õ���ͬ���ϡ���ͬ��������Һ�r�g�ͼ�Һ�������3��ʾ��
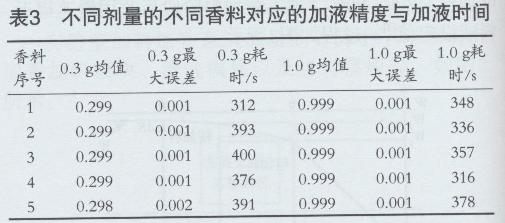
���������^�ٻ����^���r�����ĕr�g�������f�^�L�����Z�����Һ�w��Һ�r�g�����Z��С�������^�L����������^�̕r�g������С��7 min���Y���`���0.005 g�ԃȡ�
5�YՓ
����IRB120���I�C���˵ľퟟ���ܼ��ϼ��㌍��b�Ì��F���Ԅӻ�������ϣ�����˂��y���ֹ�������ϣ��ڹ�˾���������\�г��^���꣬��������^�̕r�g��������7 min�ȣ��`��С��0.005 g���F��Ч�����ã����Ͼ���ˮ�ֿ��ƝM��Ҫ��
��һƪ:��ЧҺ��ɫ�V-ԭ�ӟɹ�y�����׃��oʳ�й����ΑB
��һƪ:�����б�